Our package wrapper consists of seven subsystems: the gantry crane, grabber, folder, gluer, paper cutter and feeder, and box measurement. Using two Arduino microcontrollers and a whole host of motors and sensors, our system aims to gift-wrap a box as a skilled human would.

Gantry and Grabber
The gantry subsystem is used to move the box around the system. It can move the box in the vertical direction using a dc motor which powers a rack and pinion gear system with feedback from a rotational encoder. The gantry can also move the box along a single horizontal direction using a high-torque continuous rotation servo which drives a pulley and cable system with feedback from two infrared Sharp rangefinders.
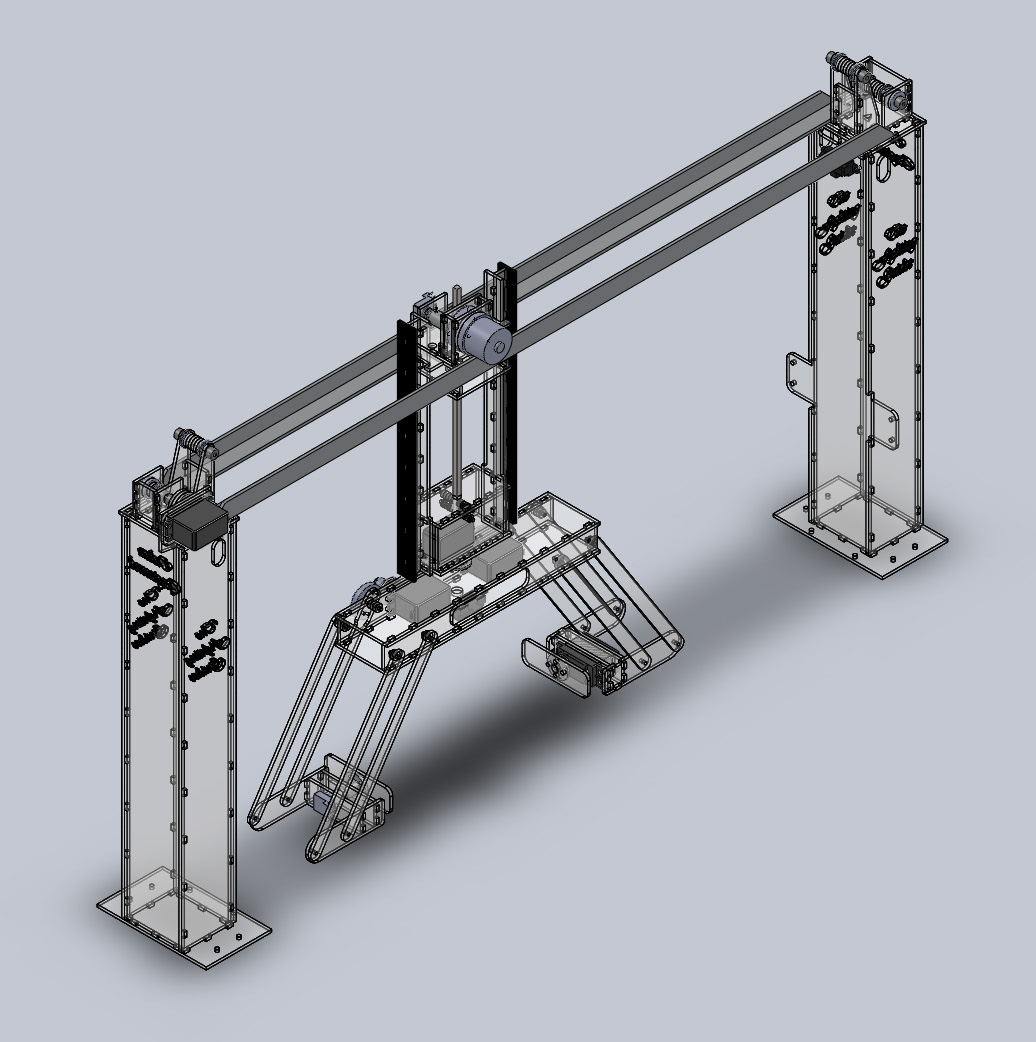

The grabber, which is attached to the gantry, is used to manipulate the box. The grabber grips the box using two four bar linkages, independently actuated by standard high-torque servo motors (with additional gearing to increase torque). It can rotate the box about a horizontal axis using two rubber pads. Torque is provided by a continuous rotation servo with feedback from a rotational encoder. By spinning the box, the grabber is able to cover four sides of the box in wrapping paper, leaving some excess hanging off the short ends. The grabber can also rotate the box about the vertical axis using a standard servo which has its own internal position feedback.

Folder
The folder subsystem is used to perform the pinching motion to start the fold at the ends of the box. This pinching creates two flaps, which the gantry and grabber then fold closed. The folder consists of two four bar linkages, actuated by a continuous rotation servo. The two linkages are coupled by a gear pair and a timing belt.

Gluer
Throughout the wrapping process, adhesive is applied to the box using Glue Dots which are dispensed by the gluer. The gluer consists of a Glue Dot spool, which is attached to a rotational encoder, and a take-up spool, which is driven by a continuous rotation servo. The glue dots pass over the top of a gluing post, which the box is pressed onto in order to apply adhesive.

Cutter and Feeder
The cutter and feeder subsystems work in tandem to dispense paper of the proper dimension. The feeder consists of a paper spool, which is connected to a continuous rotation servo and a rotational encoder, and a take-up spool, which simply collects waste paper. The cutter subsystem is positioned above the wrapping paper, next to the paper spool. The cutter consists of a continuous rotation servo which is connected to a pulley and cable system, with feedback provided from a rotational encoder. This translates the cutting blades. The cutting blades are attached to a rocker and are offset 90 degrees from one another. The rocker is actuated by a standard high-torque servo, which enables the system to make cuts either along the length or the width of the paper.



Box Measurement
The box measurement consists of three sensors: two ultrasonics mounted on the base of the system and one infrared Sharp rangefinder mounted on the grabber. The ultrasonic sensors measure the box length and width while the infrared sensor measures box height. The user starts the system by placing a box in proximity of the sensors, properly aligned according to the ruler mounted on the system base—with the center of the box aligned on the centerline of the ruler.

Team members and responsibility
Matt Bernstein - Control programming and electronics.
Josh Caputo - Mechanical design, manufacturing, and assembly.
Paul Desiderio - Mechanical design, manufacturing, and assembly.
Andy Strat - Control programming and electronics.
Video of the system in action
Mechatronics Group D from Matt Bernstein on Vimeo.
This comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDeleteThis comment has been removed by the author.
ReplyDelete